|
| | PrintCommand (std::string_view message) |
| | Creates a new a PrintCommand. More...
|
| |
| | PrintCommand (PrintCommand &&other)=default |
| |
| | PrintCommand (const PrintCommand &other)=default |
| |
| bool | RunsWhenDisabled () const override |
| | Whether the given command should run when the robot is disabled. More...
|
| |
 Public Member Functions inherited from frc2::CommandHelper< InstantCommand, PrintCommand > Public Member Functions inherited from frc2::CommandHelper< InstantCommand, PrintCommand > |
| | CommandHelper ()=default |
| |
| CommandPtr | ToPtr () &&override |
| |
| Public Member Functions inherited from frc2::InstantCommand |
| | InstantCommand (std::function< void()> toRun, std::initializer_list< Subsystem * > requirements) |
| | Creates a new InstantCommand that runs the given Runnable with the given requirements. More...
|
| |
| | InstantCommand (std::function< void()> toRun, std::span< Subsystem *const > requirements={}) |
| | Creates a new InstantCommand that runs the given Runnable with the given requirements. More...
|
| |
| | InstantCommand (InstantCommand &&other)=default |
| |
| | InstantCommand (const InstantCommand &other)=default |
| |
| | InstantCommand () |
| | Creates a new InstantCommand with a Runnable that does nothing. More...
|
| |
| Public Member Functions inherited from frc2::CommandHelper< FunctionalCommand, InstantCommand > |
| | CommandHelper ()=default |
| |
| CommandPtr | ToPtr () &&override |
| |
| Public Member Functions inherited from frc2::FunctionalCommand |
| | FunctionalCommand (std::function< void()> onInit, std::function< void()> onExecute, std::function< void(bool)> onEnd, std::function< bool()> isFinished, std::initializer_list< Subsystem * > requirements) |
| | Creates a new FunctionalCommand. More...
|
| |
| | FunctionalCommand (std::function< void()> onInit, std::function< void()> onExecute, std::function< void(bool)> onEnd, std::function< bool()> isFinished, std::span< Subsystem *const > requirements={}) |
| | Creates a new FunctionalCommand. More...
|
| |
| | FunctionalCommand (FunctionalCommand &&other)=default |
| |
| | FunctionalCommand (const FunctionalCommand &other)=default |
| |
| void | Initialize () override |
| | The initial subroutine of a command. More...
|
| |
| void | Execute () override |
| | The main body of a command. More...
|
| |
| void | End (bool interrupted) override |
| | The action to take when the command ends. More...
|
| |
| bool | IsFinished () override |
| | Whether the command has finished. More...
|
| |
| Public Member Functions inherited from frc2::CommandHelper< CommandBase, FunctionalCommand > |
| | CommandHelper ()=default |
| |
| CommandPtr | ToPtr () &&override |
| |
| Public Member Functions inherited from frc2::CommandBase |
| void | AddRequirements (std::initializer_list< Subsystem * > requirements) |
| | Adds the specified Subsystem requirements to the command. More...
|
| |
| void | AddRequirements (std::span< Subsystem *const > requirements) |
| | Adds the specified Subsystem requirements to the command. More...
|
| |
| void | AddRequirements (wpi::SmallSet< Subsystem *, 4 > requirements) |
| | Adds the specified Subsystem requirements to the command. More...
|
| |
| void | AddRequirements (Subsystem *requirement) |
| | Adds the specified Subsystem requirement to the command. More...
|
| |
| wpi::SmallSet< Subsystem *, 4 > | GetRequirements () const override |
| | Gets the Subsystem requirements of the command. More...
|
| |
| void | SetName (std::string_view name) override |
| | Sets the name of this Command. More...
|
| |
| std::string | GetName () const override |
| | Gets the name of this Command. More...
|
| |
| std::string | GetSubsystem () const |
| | Gets the subsystem name of this Command. More...
|
| |
| void | SetSubsystem (std::string_view subsystem) |
| | Sets the subsystem name of this Command. More...
|
| |
| void | InitSendable (wpi::SendableBuilder &builder) override |
| | Initializes this Sendable object. More...
|
| |
| Public Member Functions inherited from frc2::Command |
| | Command ()=default |
| |
| virtual | ~Command () |
| |
| | Command (const Command &)=default |
| |
| Command & | operator= (const Command &rhs) |
| |
| | Command (Command &&)=default |
| |
| Command & | operator= (Command &&)=default |
| |
| virtual void | Initialize () |
| | The initial subroutine of a command. More...
|
| |
| virtual void | Execute () |
| | The main body of a command. More...
|
| |
| virtual void | End (bool interrupted) |
| | The action to take when the command ends. More...
|
| |
| virtual bool | IsFinished () |
| | Whether the command has finished. More...
|
| |
| virtual wpi::SmallSet< Subsystem *, 4 > | GetRequirements () const =0 |
| | Specifies the set of subsystems used by this command. More...
|
| |
| CommandPtr | WithTimeout (units::second_t duration) && |
| | Decorates this command with a timeout. More...
|
| |
| CommandPtr | Until (std::function< bool()> condition) && |
| | Decorates this command with an interrupt condition. More...
|
| |
| CommandPtr | WithInterrupt (std::function< bool()> condition) && |
| | Decorates this command with an interrupt condition. More...
|
| |
| CommandPtr | BeforeStarting (std::function< void()> toRun, std::initializer_list< Subsystem * > requirements) && |
| | Decorates this command with a runnable to run before this command starts. More...
|
| |
| CommandPtr | BeforeStarting (std::function< void()> toRun, std::span< Subsystem *const > requirements={}) && |
| | Decorates this command with a runnable to run before this command starts. More...
|
| |
| CommandPtr | AndThen (std::function< void()> toRun, std::initializer_list< Subsystem * > requirements) && |
| | Decorates this command with a runnable to run after the command finishes. More...
|
| |
| CommandPtr | AndThen (std::function< void()> toRun, std::span< Subsystem *const > requirements={}) && |
| | Decorates this command with a runnable to run after the command finishes. More...
|
| |
| PerpetualCommand | Perpetually () && |
| |
| CommandPtr | Repeatedly () && |
| | Decorates this command to run repeatedly, restarting it when it ends, until this command is interrupted. More...
|
| |
| CommandPtr | AsProxy () && |
| | Decorates this command to run "by proxy" by wrapping it in a ProxyCommand. More...
|
| |
| CommandPtr | Unless (std::function< bool()> condition) && |
| | Decorates this command to only run if this condition is not met. More...
|
| |
| CommandPtr | IgnoringDisable (bool doesRunWhenDisabled) && |
| | Decorates this command to run or stop when disabled. More...
|
| |
| CommandPtr | WithInterruptBehavior (Command::InterruptionBehavior interruptBehavior) && |
| | Decorates this command to run or stop when disabled. More...
|
| |
| CommandPtr | FinallyDo (std::function< void(bool)> end) && |
| | Decorates this command with a lambda to call on interrupt or end, following the command's inherent Command::End(bool) method. More...
|
| |
| CommandPtr | HandleInterrupt (std::function< void()> handler) && |
| | Decorates this command with a lambda to call on interrupt, following the command's inherent Command::End(bool) method. More...
|
| |
| CommandPtr | WithName (std::string_view name) && |
| | Decorates this Command with a name. More...
|
| |
| void | Schedule () |
| | Schedules this command. More...
|
| |
| void | Cancel () |
| | Cancels this command. More...
|
| |
| bool | IsScheduled () const |
| | Whether or not the command is currently scheduled. More...
|
| |
| bool | HasRequirement (Subsystem *requirement) const |
| | Whether the command requires a given subsystem. More...
|
| |
| bool | IsComposed () const |
| | Whether the command is currently grouped in a command group. More...
|
| |
| void | SetComposed (bool isComposed) |
| | Sets whether the command is currently composed in a command composition. More...
|
| |
| bool | IsGrouped () const |
| | Whether the command is currently grouped in a command group. More...
|
| |
| void | SetGrouped (bool grouped) |
| | Sets whether the command is currently grouped in a command group. More...
|
| |
| virtual bool | RunsWhenDisabled () const |
| | Whether the given command should run when the robot is disabled. More...
|
| |
| virtual InterruptionBehavior | GetInterruptionBehavior () const |
| | How the command behaves when another command with a shared requirement is scheduled. More...
|
| |
| virtual std::string | GetName () const |
| | Gets the name of this Command. More...
|
| |
| virtual void | SetName (std::string_view name) |
| | Sets the name of this Command. More...
|
| |
| virtual CommandPtr | ToPtr () &&=0 |
| | Transfers ownership of this command to a unique pointer. More...
|
| |
| virtual | ~Sendable ()=default |
| |
| virtual void | InitSendable (SendableBuilder &builder)=0 |
| | Initializes this Sendable object. More...
|
| |
| | SendableHelper (const SendableHelper &rhs)=default |
| |
| | SendableHelper (SendableHelper &&rhs) |
| |
| SendableHelper & | operator= (const SendableHelper &rhs)=default |
| |
| SendableHelper & | operator= (SendableHelper &&rhs) |
| |
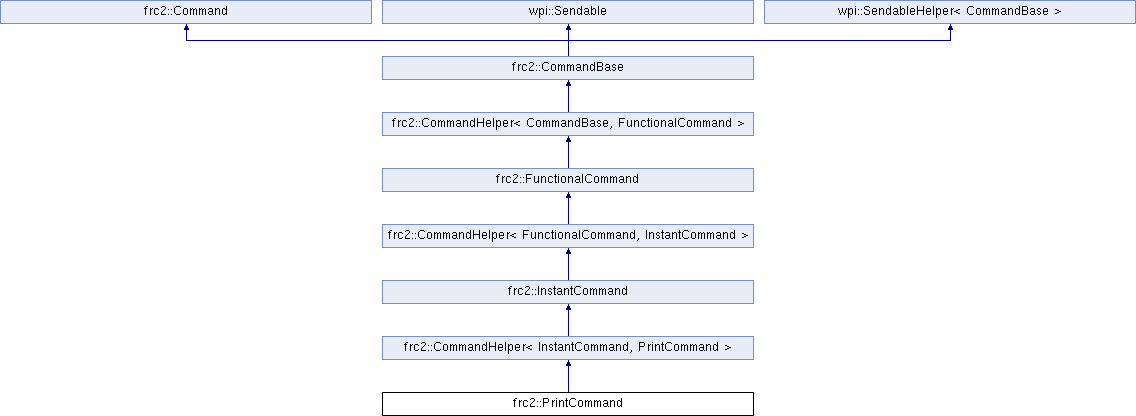
A command that prints a string when initialized.
This class is provided by the NewCommands VendorDep